



U skladištu postoje različite vrste skladišnih polica, a metode skladištenja i preuzimanja uglavnom su podijeljene u sljedeće kategorije, uključujući ručno skladištenje i preuzimanje, skladištenje i preuzimanje viličarom i automatsko skladištenje i preuzimanje. U današnje vrijeme mnoga poduzeća žele ostvariti automatski rad skladišta, pa žele koristiti automatizirane skladišne police. Na primjer, četverosmjerni stalak za automobil je vrsta automatiziranog regala za skladištenje. Kako četverosmjerni shuttle AGV ulazi i izlazi iz skladišta? Analizirani skladišni pogon za proizvodnju teških polica Haigris.

Skladište za prijevoz u četiri smjera
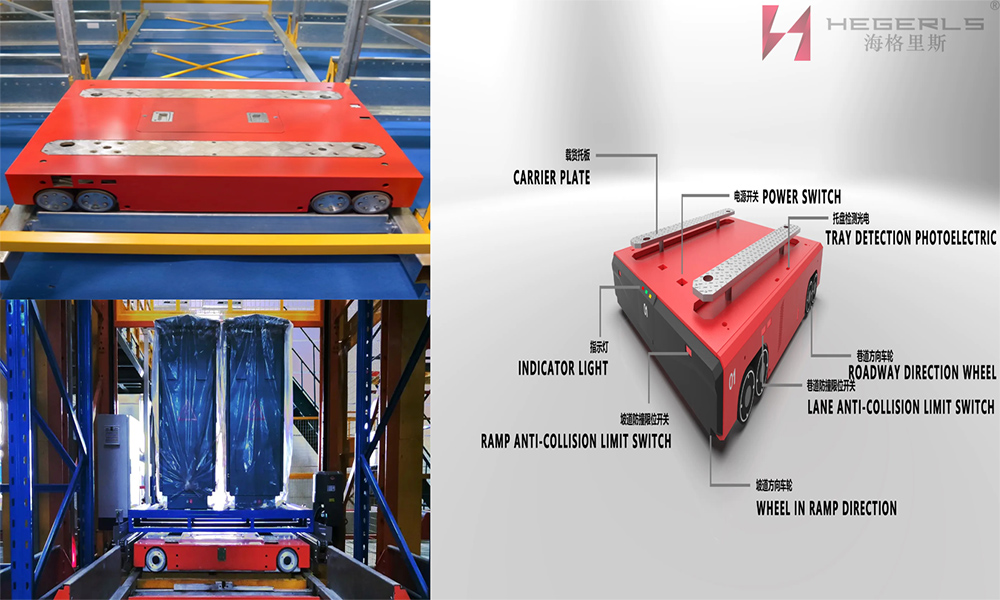
Četverosmjerni shuttle automobil opremljen je s 12 kotača, koji se mogu kretati u četiri smjera duž ravnine staze i slobodno doći do bilo kojeg teretnog prostora na ravnini skladišta. Četverosmjerni shuttle pokreću kotači s obje strane u isto vrijeme kako bi se osiguralo da se karoserija automobila ne savija tijekom rada, a može se naizmjenično kretati duž uzdužnih i poprečnih tračnica na trodimenzionalnoj polici.

U isto vrijeme, četverosmjerni šatl je inteligentan uređaj za rukovanje koji može hodati ne samo uzdužno, već i bočno. Četverosmjerni šatl ima visoku fleksibilnost, može po želji mijenjati radni put i prilagoditi kapacitet sustava povećanjem ili smanjenjem broja vagona za šatl. Ako je potrebno, na vršnu vrijednost sustava može se odgovoriti uspostavljanjem načina raspoređivanja radnog tima vozila, rješavanjem uskog grla ulaznih i izlaznih operacija, a također se mogu zamijeniti jedni s drugima, kada shuttle ili dizalo zataji, drugo shuttle ili dizala mogu se poslati kroz dispečerski sustav kako bi nastavili dovršavati operaciju bez utjecaja na kapacitet sustava. Ovaj je uređaj prikladan za pohranjivanje s malim protokom i velikom gustoćom, kao i za pohranjivanje s velikim protokom i velikom gustoćom. Može postići veću učinkovitost, troškove i resurse.
Kako četverosmjerni shuttle AGV ulazi i izlazi iz skladišta?

1) Metoda skladištenja
a) Tehničari inteligentnog četverosmjernog shuttlea prvo uključe inteligentni četverosmjerni shuttle i pripreme ga. Inteligentni četverosmjerni shuttle je u stanju pripravnosti;
b) Nakon potvrde mjesta odabira inteligentnog četverosmjernog shuttlea, WCS će isplanirati rutu vožnje u skladu s trenutnom lokacijom i odredišnom lokacijom inteligentnog četverosmjernog shuttlea, a zatim će osoblje distribuirati robu inteligentnom četverosmjernom prijevozu. shuttle kroz WCS;
c) Inteligentni četverosmjerni shuttle počinje izvršavati zadatak isporuke prema primljenoj naredbi zadatka;
d) Na prijelaznoj stazi, inteligentni četverosmjerni shuttle putuje u modu pomaka kroz stvarnu udaljenost. Tijekom procesa vožnje kontinuirano skenira tragove kroz koje prolazi donji dio karoserije vozila. Svaki položaj prijelaza koji prođe, procjenjuje i kalibrira udaljenost koju putuje skeniranjem tragova. Kada je blizu odredišta, fino podešava položaj parkiranja putem bočnog laserskog senzora kako bi se postiglo točno pozicioniranje položaja parkiranja;
e) U podkanalu, inteligentni četverosmjerni shuttle može skenirati poprečnu stazu i reflektor bočnog kalibracijskog zrcala, procijeniti i provjeriti udaljenost vožnje skeniranjem položaja točke i postići točnu kontrolu pozicioniranja u podkanalu kako bi se stiglo do odredišta;
f) Kada inteligentni četverosmjerni shuttle stigne na odabranu poziciju za komisioniranje, paleta se spušta, roba se stavlja na policu, a WCS sustav dobiva obavijest o završetku zadatka isporuke;
g) Inteligentni četverosmjerni shuttle nastavlja primati upute za zadatak ili se vraća u područje pripravnosti.
2) Način dostave
a) Tehničari inteligentnog četverosmjernog shuttlea prvo uključe inteligentni četverosmjerni shuttle i pripreme ga. Inteligentni četverosmjerni shuttle je u stanju pripravnosti;
b) Nakon potvrde mjesta odabira inteligentnog četverosmjernog shuttlea, WCS će planirati rutu vožnje prema trenutnoj lokaciji i odredišnoj lokaciji inteligentnog četverosmjernog shuttlea, a zatim će osoblje poslati zadatak odabira inteligentnom četiri -way shuttle kroz WCS;
c) Inteligentni četverosmjerni shuttle počinje s preuzimanjem robe prema primljenoj naredbi zadatka;
d) Na prijelaznoj stazi, inteligentni četverosmjerni shuttle putuje u modu pomaka kroz stvarnu udaljenost. Tijekom procesa vožnje kontinuirano skenira tragove kroz koje prolazi donji dio karoserije vozila. Svaki prijelazni položaj kojim prođe, procjenjuje i provjerava udaljenost koju prijeđe skeniranjem tragova. Kada se približava odredištu, fino podešava položaj parkiranja putem bočnog laserskog senzora kako bi se postigla precizna kontrola pozicioniranja i parkiranja;
e) U podkanalu, inteligentni četverosmjerni shuttle automobil skenira poprečnu stazu i reflektor bočnog kalibracijskog ogledala, procjenjuje i kalibrira udaljenost vožnje skeniranjem ovih točaka i ostvaruje kontrolu preciznog pozicioniranja u podkanalu kako bi se stiglo do odredišta .
Vrijeme objave: 19. rujna 2022